Драйвер шагового двигателя своими руками
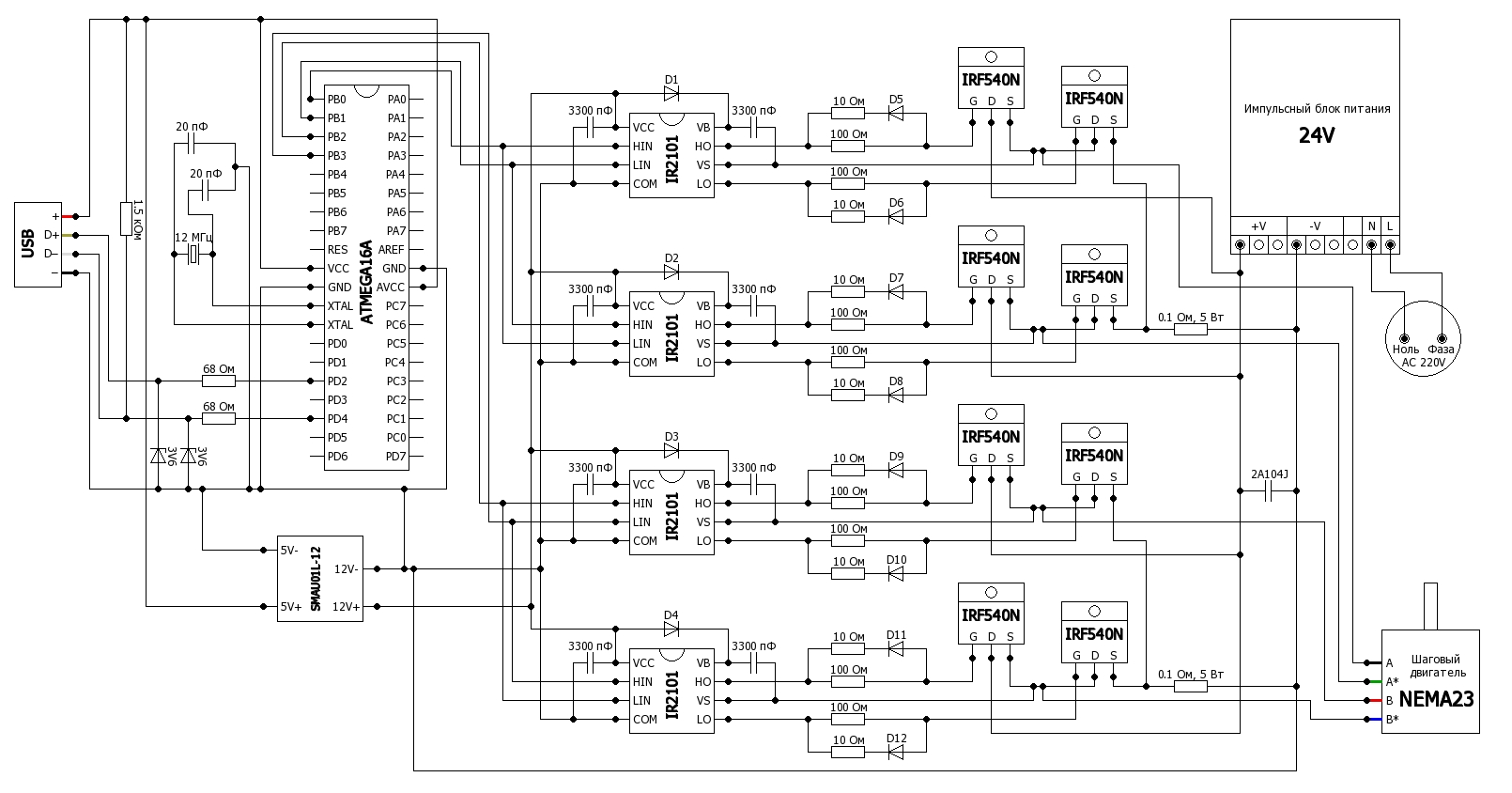
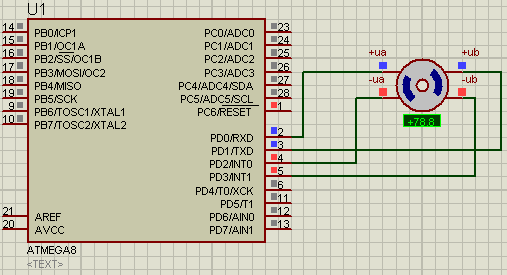
В этой статье представлен драйвер для 4х-проводных шаговых двигателей, который можно использовать при создании систем автоматизации или игрушек. Помимо несложной схемы, устройство характеризуется рядом полезных функциональных возможностей. Рисунок 1. Принципиальная схема драйвера шагового двигателя. Принципиальная схема контроллера представлена на рисунке 1. Система должна питаться постоянным напряжением









В рекомендациях по применению описывается построение точного линейного контроллера шагового двигателя. Шаговый двигатель — это электромагнитное устройство, которое преобразует дискретные импульсы в механическое вращение вала. Благодаря применению данного типа двигателя достигается множество преимуществ, к числу которых относятся большая простота, так как отсутствуют щетки и контакты, низкая стоимость, высокая надежность, высокий крутящий момент на низких скоростях, и высокая точность перемещения.



Шаговые двигатели интересны тем, что позволяют повернуть вал на определённый угол. Этими возможностями шаговых двигателей определяется и область их применения. В основном они используются для позиционирования различных устройств: считывающих головок в дисководах, печатающих головок в принтерах и плоттерах и т.